
时间:2022-03-14 11:23:25浏览:0次
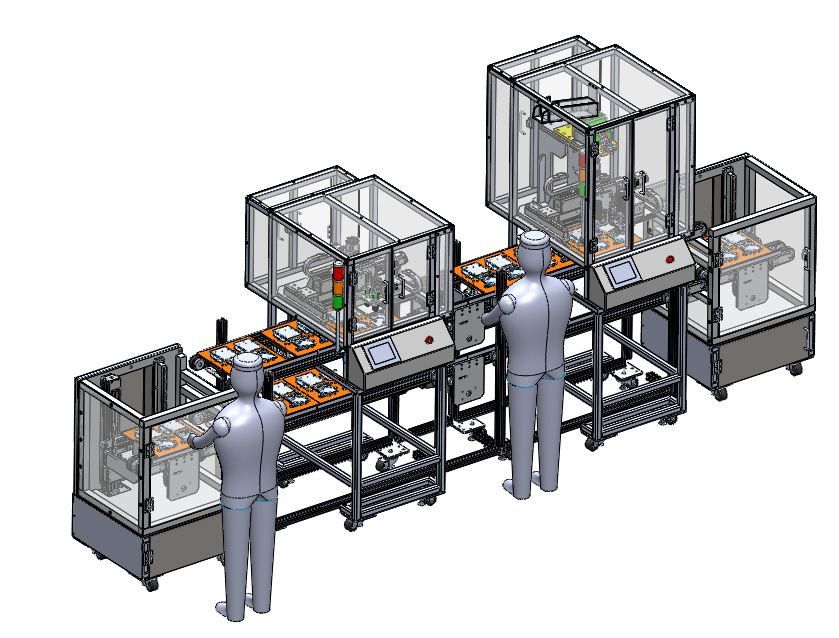
桁架式机器人即桁架式上下料机械手,也叫做直角坐标机器人和龙门式机器人。工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机。其特点主要是多自由度运动,每个运动自由度之间的空间夹角为直角,可自动控制的,可重复编程,所有的运动均按程序运行。桁架式机械手按不同体例分类:
数控机床桁架机械手可以应用于许多种工业生产过程中,但是生产内容不同所使用的机械手类型也不同。重要分类为专用数控机床机械手和通用数控机床机械手两大类。其中专业车床机械手就是只能够用于特定的生产过程中,主控系统程序是固定的不能随意更改的,这种机械手通常情况下用于单一工业生产过程;而通用数控机床机械手就是指机械手可以用于不同工业生产过程,其主控系统程序可以根据控制必要进行更改调整,在不同场合提供不同的活动体例。
驱动体例决定着桁架机械手的活动体例,它也是区分机械手类型的紧张因素。数控车床机械手一样平常有气动、液压、机械、电气等驱动体例。气压是寄托压缩空气来驱动的,这种机械手以空气为介质,制造成本较低,而且能够广泛适用于许多高危生产环境中。3、按照控制体例分类
现阶段数桁架机械手的控制体例就两种:点位控制和轨迹控制。点位控制思想就是路径线段化,将数控机床机械手必要活动路径划分为规定距离的微小线段,划分的线段端点越多,桁架机械手的活动精度就越高,但同时这种控制体例对系统的要求也比较高。








 139 2464 3941
139 2464 3941